
Polar robots, also known as spherical robots, are a type of robot that operates in a polar coordinate system. Unlike cartesian robots that move in a straight line, polar robots use an articulated robot arm with rotary joints to move in multiple directions along a different axis. These articulated robot arms allow for greater flexibility and precision in movement. Additionally, some polar robots are equipped with computer vision technology to enhance their ability to perceive and interact with their environment. Cobots, or collaborative robots, can also be designed using polar robot technology to work safely alongside humans.
Spherical AMRs (Autonomous Mobile Robots) are spherical robots that can move autonomously without human intervention. They are often used in manufacturing and logistics settings to transport goods and materials from one location to another. Robotic arms, cobots, and articulated arms are also commonly used in these settings for automation purposes.
Delta robots and SCARA (Selective Compliance Assembly Robot Arm) robots are examples of cartesian robots that operate in a cartesian coordinate system. While these types of robots have their own advantages, they lack the flexibility and precision of polar/spherical robots. With the rise of automation, cobots or collaborative robots, which are articulated arms designed to work alongside human operators, are becoming more popular. These cobots can be equipped with computer vision technology to enhance their accuracy and safety in performing tasks.
Types of Industrial Robots, Including Polar/Spherical Robots
Industrial robots, including cobots and robotic arms, are machines designed for automation in manufacturing and other industries. They have revolutionized the way we work by automating repetitive tasks, increasing efficiency, and reducing costs. These machines are specifically designed for working in hazardous environments and can perform various tasks with precision. There are different types of industrial robots available in the market, each with its unique features and applications.
Cylindrical Robots
Cylindrical robots are designed with a cylindrical shape and can move along a linear axis. These robots are ideal for performing pick-and-place operations such as loading and unloading parts from a conveyor belt or assembly line. They can also be used for welding, painting, and material handling tasks. Additionally, cobots, cartesian robots, and rigid robots are other popular options for industrial automation. Some cobots are designed to mimic the movements of a human arm, while cartesian robots move along three linear axes. Rigid robots are also commonly used for precise and repetitive tasks in manufacturing environments.
Gantry Robots
Gantry robots with articulated arms and working joints are large machines that move along a track and are used for heavy-duty tasks. They have a wide range of applications such as loading and unloading heavy parts from CNC machines, palletizing products on an assembly line, or moving materials around a warehouse. Cobots can also be integrated with gantry robots to improve efficiency and accuracy in various industrial settings.
Polar/Spherical Robots
Polar/spherical robots, along with cobots and cartesian robots, have a spherical work envelope and can move in any direction within that space using articulated arms. These robots are ideal for performing complex tasks that require high precision such as assembling small electronic components or picking up delicate objects without damaging them. They are commonly used in working environments where accuracy and flexibility are essential.
One of the main advantages of polar/spherical robots is their ability to work in tight spaces while still maintaining high accuracy levels. This makes them ideal for use in cleanroom environments where space is limited. However, it is important to note that there are also disadvantages to using these types of robots, such as limited reach and flexibility compared to cartesian or articulated arm robots. Additionally, cobots may be a better option for collaborative work in tight spaces as they offer more safety features.
Another key advantage of polar/spherical robots is their flexibility, making them a preferred choice over cartesian robots. Unlike cartesian robots that can only move in straight lines, polar/spherical robots can move freely within their workspace, allowing them to easily collaborate with cobots in handling objects. This means they can adapt to changes in production requirements quickly without requiring reprogramming or recalibration.
Advantages of Using Polar/Spherical Robots in Industrial Settings
Robots, including cobots, have revolutionized the industrial sector, and polar/spherical robots are no exception. These robots offer several advantages that traditional cartesian robots cannot match, especially in space and underwater environments. In this section, we will discuss the key advantages of using polar/spherical robots in industrial settings.
Greater Precision and Accuracy
One of the primary advantages of using polar/spherical robots, as well as cartesian arms and cobots, is their ability to offer greater precision and accuracy. These robots can perform tasks with incredible precision, reducing the risk of errors and increasing efficiency. This level of accuracy is particularly important in industries such as manufacturing, where even minor errors can lead to significant losses. Additionally, some of these robots are designed for underwater applications, making them ideal for use in aquatic environments.
Wider Range of Motion
Polar/spherical robots, equipped with cartesian arms and joints, have a wider range of motion than traditional robots, which allows them to access hard-to-reach areas and perform tasks that other machines cannot. This feature makes these robots ideal for use in industries such as aerospace, where they can be used to assemble complex components in tight spaces. Additionally, these robots are also suitable for underwater applications due to their advanced range of motion capabilities.
Operate in Extreme Temperatures and Harsh Environments
Another advantage of using polar/spherical robots, as opposed to cartesian ones, is their unique design with arms that can reach into tight spaces and perform complex tasks. These arms are especially useful in manufacturing and assembly lines where precision is key. Additionally, polar/spherical robots have the ability to operate in extreme temperatures and harsh environments, making them ideal for use in industries such as mining and oil exploration.

Improved Workplace Safety
The use of polar/spherical robots with arms can improve workplace safety by reducing the need for human workers to perform dangerous tasks. These machines with arms can be used to perform tasks such as welding or cutting without exposing workers to hazardous conditions.
Disadvantages and Limitations of Polar/Spherical Robots
Polar robots, also known as spherical robots, are designed to operate in environments with limited accessibility. They have a unique design that enables them to move in any direction within their workspace. However, despite their versatility, these robots have several disadvantages and limitations that affect their performance and functionality. One of the limitations is their lack of arms.
Limited Workspace Due to Spherical Design
One of the key disadvantages of polar robots is their limited workspace. The spherical design restricts the range of motion and reduces the available workspace compared to traditional robotic arms. This makes it difficult for polar robots to perform tasks that require a large working area or reach.
Difficulty in Maintaining Stability and Balance
Another disadvantage of polar robots is their difficulty in maintaining stability and balance during operation. The spherical design creates a high center of gravity which makes it challenging for the robot to maintain balance while moving or carrying payloads with its arms. This can result in reduced accuracy, precision, and repeatability.
Complex Control Systems Required for Movement
Polar robots with multiple arms require complex control systems due to their unique design. The control systems must be capable of managing multiple degrees of freedom simultaneously while maintaining stability and balance. This complexity increases the cost of development, maintenance, and repair.
Limited Payload Capacity Due to Design Constraints
The spherical design also limits the payload capacity of polar robots compared to traditional robotic arms. The weight distribution on a polar robot is not evenly distributed due to its shape which makes it difficult for the robot to carry heavy loads without compromising its stability.
Higher Cost Compared to Traditional Robots
Polar robots are more expensive than traditional robotic arms due to their complex design and control systems requirements. The higher cost can make them less accessible for small businesses or startups looking for automation solutions.
Limited Availability of Compatible End-Effectors
End-effectors are tools or attachments that enable robotic arms to perform specific tasks such as gripping objects or cutting materials. Polar robots have limited availability of compatible end-effectors due to their unique design. This can limit the range of applications that polar robots can perform.
Applications of Polar/Spherical Robots in Various Industries
Polar robots with multiple arms have become increasingly popular in industrial applications due to their unique ability to work within a spherical work envelope. This makes them ideal for automation in tight and hard-to-reach places, reducing the need for human intervention and increasing efficiency. In this article, we will explore some of the most common applications of polar robots with multiple arms in various industries.
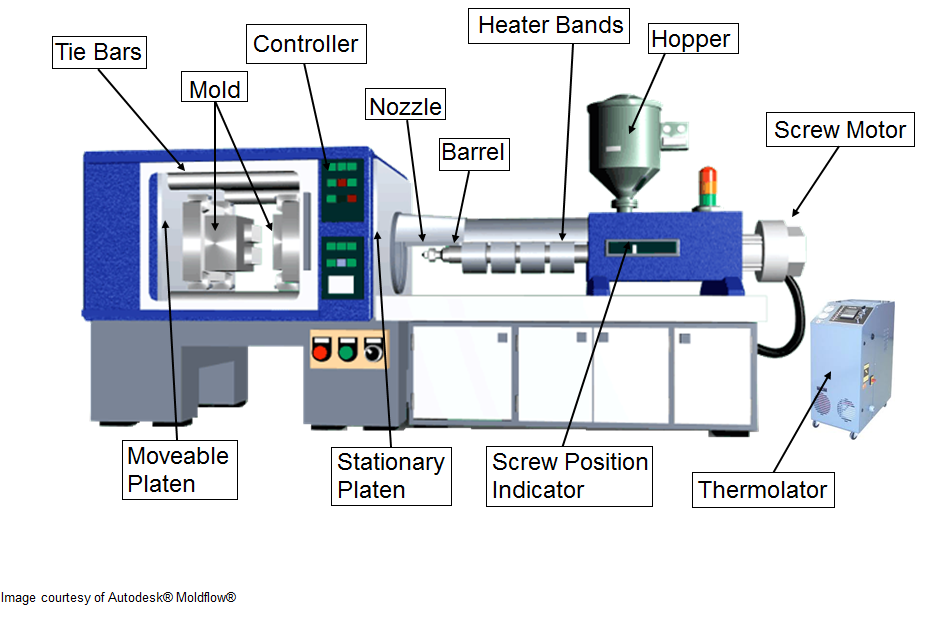
Injection Molding
One of the most common applications of polar robots is in injection molding. These robots, equipped with an arm, can be used to remove finished products from the mold and place them on a conveyor belt for further processing. The use of polar robots with an arm in injection molding has several advantages, including increased speed, accuracy, and repeatability. Since these robots are capable of working within a spherical work envelope, they can easily access parts that would otherwise be difficult or impossible to reach.
Machine Tending
Another application of polar robots is in machine tending. These arm robots can be programmed to load and unload heavy objects onto machines, reducing the risk of injury to human workers. They can also perform other tasks such as part inspection and cleaning. The use of polar robots in machine tending has been shown to increase productivity while reducing costs associated with workplace injuries.
Assembly Operations
Polar robots are also commonly used in assembly operations where they can be equipped with specialized arm tooling to perform complex tasks such as screwing, welding, and painting. These tasks require high levels of precision which can be easily achieved through the use of polar robots. Since these robots are capable of working within a spherical work envelope, they can easily access parts that would otherwise be difficult or impossible to reach.
Other Industrial Applications
Aside from injection molding, machine tending, and assembly operations; there are many other industrial applications where polar/spherical robots with arm find their place. Here are some examples:
- Material handling: Polar/spherical robot arms, along with industrial robots such as cylindrical, cartesian, and articulated robots, can be used to move and manipulate materials in various industries such as logistics, warehousing, and manufacturing.
- Quality control: Polar/spherical robots with an arm can be used to inspect parts for defects or inconsistencies. They can also perform other quality control tasks such as measuring dimensions and checking for proper assembly.
- Packaging: Polar/spherical robots with arm are commonly used in packaging applications where they can pick and place items into boxes or onto pallets.
Historical Evolution of Polar/Spherical Robots
Polar robots with arm have come a long way since their inception in the 1960s. Developed by the Stanford Research Institute for NASA’s Jet Propulsion Laboratory, the first polar robot with arm was designed to explore extraterrestrial environments. Since then, these robots with arm have been utilized in a variety of applications, including underwater exploration, oil drilling, scientific research, and more.
The First Polar Robot
In the early days of polar robotics, most robots were spherical in shape and had limited functionality. The first polar robot developed by Stanford Research Institute was known as “Shakey.” Shakey was equipped with a television camera and range finder that allowed it to navigate its environment autonomously. Despite its limitations, Shakey paved the way for future developments in robotic technology. However, it did not have an arm for manipulation.
Underwater Exploration and Oil Drilling
In the 1980s, polar robots with advanced arm technology were used extensively for underwater exploration and oil drilling in Arctic and Antarctic regions. These robots were able to withstand extreme conditions such as freezing temperatures and strong currents while their arms allowed them to perform precise tasks at great depths where human divers could not go.
One notable example is the Iceberg Rover Project conducted by Canada’s National Research Council in 1986. This project involved using remote-controlled vehicles and autonomous mobile robots to study icebergs off the coast of Newfoundland. The data collected from this project helped improve our understanding of iceberg dynamics and led to safer navigation practices. The use of underwater robots and collaborative robots provided significant advantages in terms of data collection and analysis.

Scientific Research
In the early 2000s, polar robots began to be used for scientific research in extreme environments such as glaciers and volcanoes. These robots were equipped with sensors that allowed them to collect data on temperature, pressure, gas emissions, and other environmental factors.
For example, researchers from Arizona State University used a robot named Yeti to study glaciers in Alaska’s Denali National Park. Yeti was able to travel over rough terrain at high altitudes while collecting valuable data on glacier dynamics. The use of autonomous mobile robots like Yeti provides numerous robots advantages for scientific research, including the ability to operate in challenging environments. Additionally, underwater robots and collaborative robots are becoming increasingly popular tools for exploring and studying remote or hazardous areas.
Advanced Technologies
Today, polar robots are being developed with advanced technologies such as artificial intelligence and machine learning. These robots are capable of autonomous decision-making and can adapt to changing environments.
One example of robots advantages is the SnowBot, an autonomous mobile robot developed by researchers at Georgia Tech. The SnowBot is equipped with sensors that allow it to collect data on snowpack conditions in mountainous regions. Additionally, underwater robots and industrial robots can also be used to collect data and perform tasks in their respective environments.
Polar robots are being used for various applications including search and rescue missions and environmental monitoring. These robots have proven to be valuable tools in extreme environments where human intervention may not be possible or safe.
Emerging Technologies and Trends for Polar/Spherical Robots
Autonomous mobile robots are revolutionizing the way we explore polar regions. These robots are designed to operate in harsh environments without human intervention, making them ideal for collecting data and conducting research in areas that are difficult or dangerous for humans to access.
One of the key advantages of using robot tech in polar exploration is the ability to gather more accurate and detailed information about the region’s climate, geology, and wildlife. With advanced sensors and imaging technology, these robots can capture high-resolution images, collect samples, and analyze data in real-time.
As machine learning and computer vision technologies continue to evolve, polar robots are becoming even more sophisticated. These emerging technologies enable robots to navigate complex terrain with greater accuracy and make decisions based on real-time data. For example, some polar robots use lidar sensors to create 3D maps of their surroundings, while others use neural networks to identify objects and avoid obstacles.
Spherical robots are particularly well-suited for polar environments where traditional wheeled or tracked vehicles may struggle to operate. These innovative machines can roll and move in any direction, allowing them to traverse uneven terrain with ease. Some spherical robots even have the ability to climb steep inclines or crawl over obstacles like rocks or ice formations.
Despite their many advantages, there is still much room for improvement. As demand for polar research continues to grow, researchers will likely focus on developing even more advanced autonomous mobile robots that can withstand extreme temperatures, windswept landscapes, and other challenging conditions.
Factors to Consider When Choosing a Polar/Spherical Robot
Polar robots, also known as spherical robots, are designed for use in extreme environments such as the Arctic and Antarctic regions. These robots can withstand harsh weather conditions and operate in areas where humans cannot. However, not all polar robots are created equal. Here are some factors to consider when choosing a polar/spherical robot:
Payload Capacity
Payload capacity is one of the most important factors to consider when choosing an industrial robot. The payload capacity refers to the weight that the robot can carry, which is crucial in determining its robots advantages. A higher payload capacity means that the cartesian robot can carry more equipment or supplies, making it more efficient. When it comes to underwater robots, payload capacity is also essential as it determines how much equipment or supplies the robot can transport in aquatic environments.
Operating Temperature Range
Another important factor to consider when choosing a polar robot is its operating temperature range. Polar environments are extremely cold, and not all robots can operate in these conditions. It is essential to choose a robot with an operating temperature range that matches the environment it will be used in.
Power Source and Endurance
The power source and endurance of a polar robot, as well as underwater robots, cartesian robots, industrial robots, and articulated robots are critical factors to consider when making your choice. The power source refers to how the robot is powered, whether by batteries or another energy source such as solar panels or fuel cells. Endurance refers to how long the robot can operate on a single charge or tank of fuel.
Mobility and Maneuverability
Finally, mobility and maneuverability are crucial considerations when selecting a polar/spherical robot. These robots need to be able to move over rough terrain easily without getting stuck or tipping over. They should also be able to maneuver around obstacles such as rocks or ice formations.
The Promising Future of Polar/Spherical Robots in Industry
Polar/spherical robots are revolutionizing the way industries operate, particularly in environments that are difficult for humans to access. These robots have the ability to perform tasks underwater, at high speeds, and in other challenging conditions with ease. In this article, we’ll discuss some of the key talking points about polar robots and their role in industry.
Underwater Robots
One of the most exciting applications for polar robots is underwater exploration and maintenance. These robots can be used to inspect pipelines, repair offshore structures, and explore areas that are too deep or dangerous for human divers. They are equipped with sensors that allow them to navigate through water and detect changes in temperature, pressure, and salinity. With advances in technology, underwater robots are becoming more sophisticated and efficient than ever before.
Collaborative Robots (Cobots)
Collaborative robots or cobots are a type of polar robot that works alongside humans. They can be programmed to perform repetitive tasks such as assembly line work or packaging while ensuring safety around human workers. Cobots have built-in sensors that detect when they come into contact with a person or object, allowing them to stop immediately if necessary. This makes them an ideal solution for manufacturers looking to improve efficiency while maintaining a safe workplace.
Robotic Arms
Robotic arms come in various shapes and sizes but share one common goal: improving speed and accuracy on production lines. Delta robots excel at high-speed pick-and-place operations such as sorting products on conveyor belts while SCARA (Selective Compliance Assembly Robot Arm) robots are commonly used for assembly tasks like screwing bolts into place or inserting components into devices.
These industrial robotic arms, including articulated and cartesian robots, can be programmed with artificial intelligence (AI) algorithms that enable them to learn from experience over time. Computer vision technology also allows these machines, including underwater robots, to recognize objects accurately without any human intervention.
Sensors
Sensors play a crucial role in the operation of polar robots. They allow machines to detect and respond to changes in their environment, ensuring that they operate efficiently and safely. For example, a robot arm may have sensors that detect when it has picked up an object or when it’s about to collide with an obstacle.
The use of sensors is constantly evolving, making polar robots even more versatile and efficient in industry. Newer technologies like LiDAR (Light Detection and Ranging) are being integrated into robots, allowing them to “see” their surroundings in 3D.
References and Further Reading
For those interested in learning more about polar robots, various resources are available. Some useful references include academic journals, books on robotics, industry publications, and online forums.
In terms of further reading, exploring the historical evolution of polar/spherical robots and emerging technologies in this field is recommended. Understanding the advantages and limitations of these types of robots can also help select the right one for a particular application.
When choosing a polar/spherical robot, cartesian, industrial, articulated, and underwater robots are also important factors to consider. It is crucial to assess each type of robot’s payload capacity, reach, accuracy, speed, and cost. Consulting with experts in the field or attending industry conferences can keep you up-to-date on new developments.
Overall, while there are some limitations to using polar/spherical robots in industrial settings, their unique capabilities make them well-suited for certain applications. As technology evolves and improves, we can expect even more promising advancements in this field.



Leave a Reply